
前言
虽然现在深度卷积神经网络在计算机视觉领域表现的非常优秀,但它在大型数据集上训练时需要花费大量GPU计算时间,并且前向推理需要大量的计算力。我们希望深度卷积网络可以在嵌入式平台部署,并且希望在保证精度的情况下加快它的推理速度。常规的基于FFT的卷积对于大型滤波器是快速的,但是现有技术的卷积神经网络一般使用小的3×3滤波器。论文引入了基于Winograd的最小滤波算法,一种新的卷积神经网络快速算法。算法在小卷积上计算复杂度最小,这使得它在滤波器和batch小的情况下更快。论文使用VGG网络对算法的GPU实现进行基准测试,并展示了批处理大小从1到64的时时吞吐量。[1]
Cong和Xiao使用Strassen算法进行快速矩阵乘法,以减少卷积网络层中的调度次数,从而降低其总算术复杂度。 作者还提出,来自算术复杂性理论的更多技术可能适用于衔接。
原始的Winograd算法,前置了很多数论方面的知识,为了效率我就没有深入的去阅读了。本文主要针对阅读了Fast Algorithms for Convolutional Neural Networks。
卷积公式
假设卷积为G,图像为D,输入参数数量N,通道C,高H,宽W
卷积核参数通道C,高R,宽S,则卷积公式如下

我们可以将整个图像的输出写作(其中*指代2D相关性)
算法
假设用长度为r的FIR滤波器来得到输出m的式子为,传统的winograd算法需要次乘法。我们可以通过堆叠一维算法来得到二维的最小算法——假设指代用的滤波器来计算得到的输出,则它需要
 次乘法。以此为例,我们可以继续堆叠一维算法来得到多维的最小算法。
次乘法。以此为例,我们可以继续堆叠一维算法来得到多维的最小算法。
但是需要注意不管是一维、二维还是多维的最快计算法,它要求输入的数量与所需乘法数一样。
我们知道,乘法和加法在硬件实现上的时间复杂度一般是不一样的,乘法运算所需的时间通常远大于加法所需的时间。因此,用廉价运算代替昂贵运算也是加速运算的一种方法。原始的矩阵运算对于需要6次乘法,而Winograd提出了如下算法,
 其中,
其中,
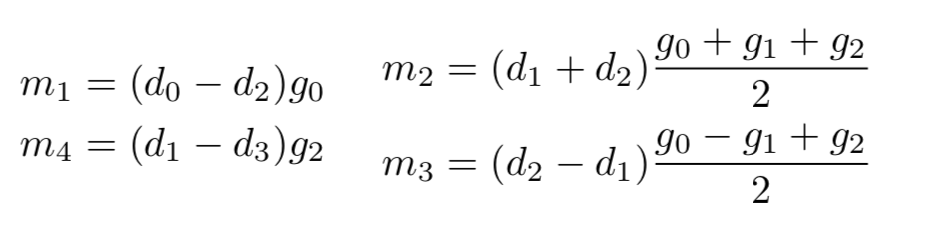
该算法只用了个乘法就计算得到了,不过它涉及了4个与输入数据有关的加法,还有与常数滤波器有关的3个加法(只要算一次就行了)和2个乘法(因为滤波器为常数,所以这3个加法和2个乘法可以认为不占用时间)。
我们可以将矩阵公式写成
 其中,指逐元素的乘法(就是点乘,卷积用的)。对于而言,上述公式各元素表示的意义如下
其中,指逐元素的乘法(就是点乘,卷积用的)。对于而言,上述公式各元素表示的意义如下
堆叠一维算法可以得到二维算法如下(这一步论文没有具体的分析,不是很懂为什么,估计是各种线性变换( ̄▽ ̄) )
 其中,是一个的滤波器,是一个的输入图像块。
其中,是一个的滤波器,是一个的输入图像块。
用winograd只需要次乘法,而原始矩阵运算则需要次乘法运算。尽管winograd法还需要用32次加法来进行数据转换,用28个浮点运算指令来进行滤波器转换,用24次加法来进行反转变换,但是相比原始矩阵运算法还是提升很大。
可以被用来计算卷积核为的卷积操作。其中,输入图像的每个通道需要被切割成大小的块(每个块与相邻块间有的重叠区域),则每个通道可以有个块。然后可以分别计算所有块然后累加得到最终结果。
假设和,则
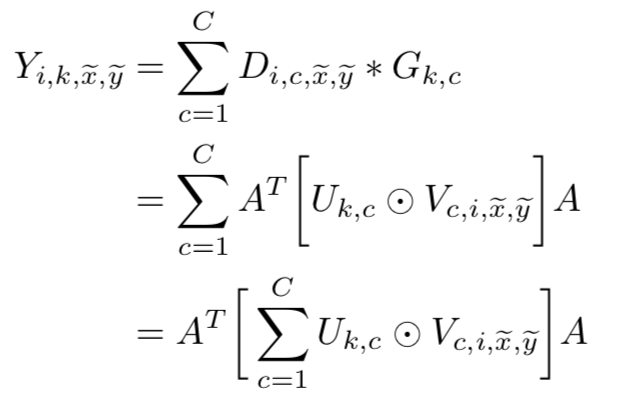
以为各个块坐标,指单张图片,为滤波器,则可以将上述卷积公式改写成,
以下是具体实现的伪代码
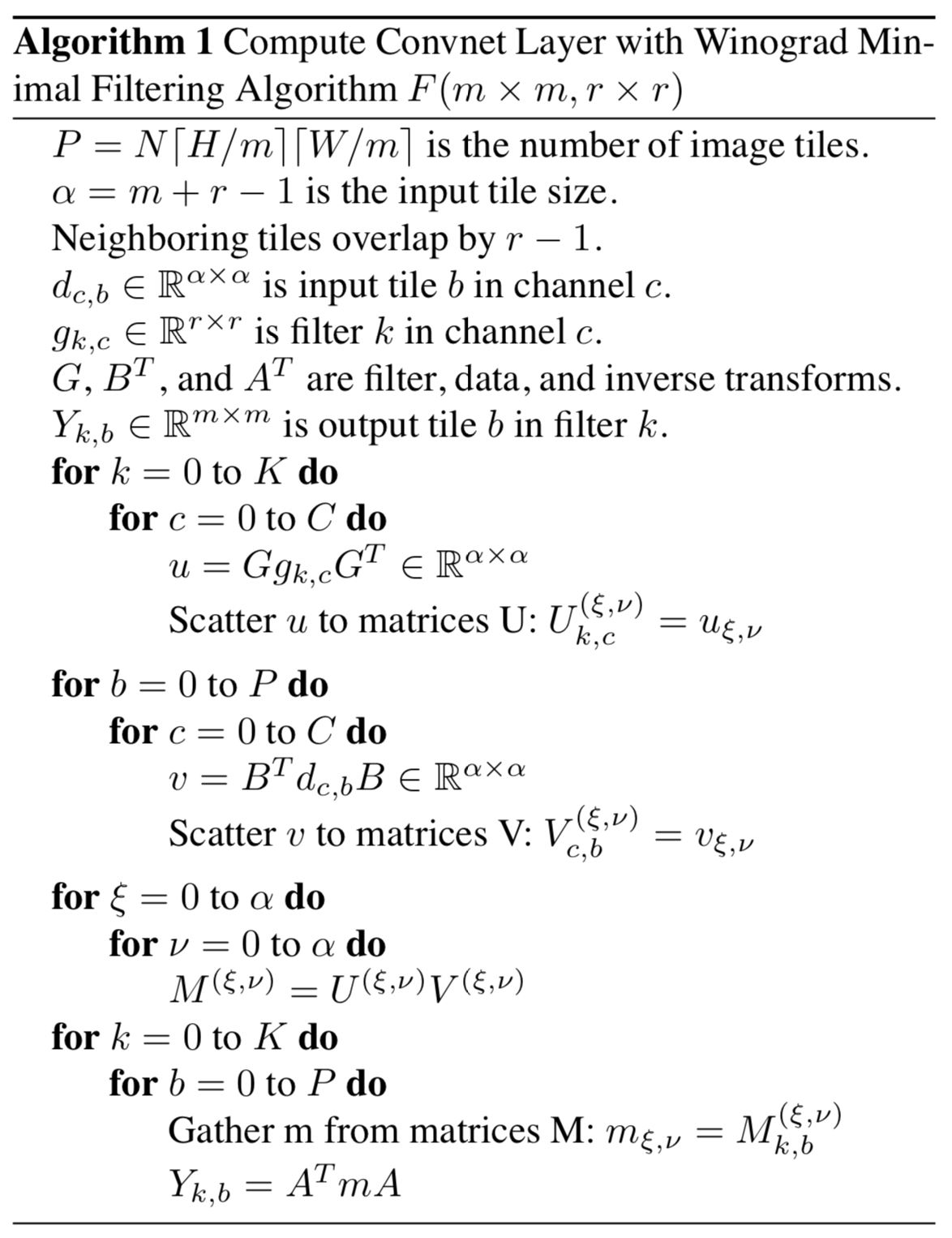
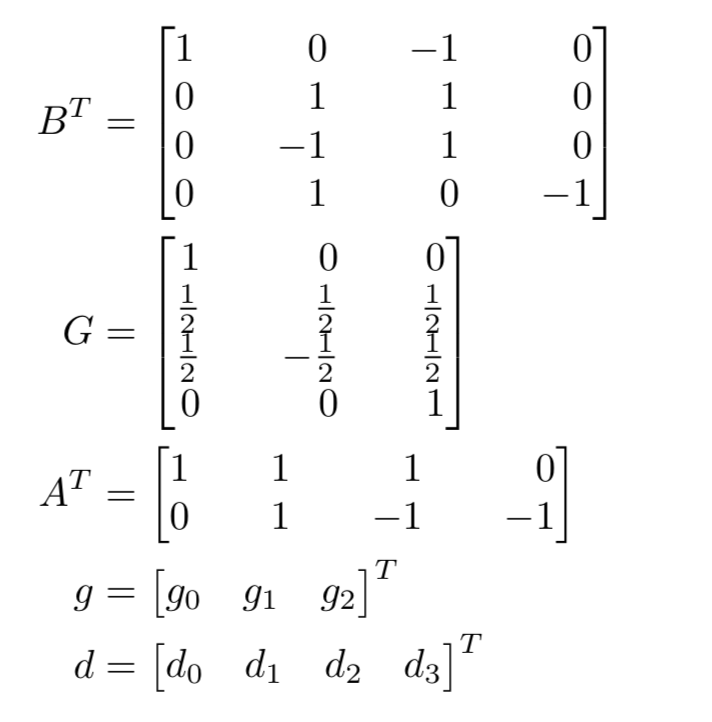
论文接下来的算法介绍主要提供了和的矩阵。
理解
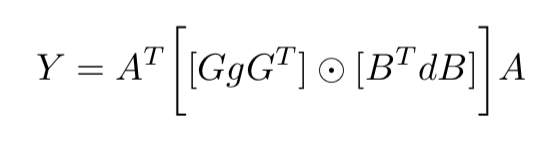
下面这个公式是最重要的一块。
根据不同的卷积核有不同的值,而且是提前计算好的,可以用https://github.com/andravin/wincnn的脚本计算。不过,也不是可以通过脚本直接得到的,还需要自己确定个插值点,wincnn的作者推荐了https://openreview.net/forum?id=H1ZaRZVKg¬eId=H1ZaRZVKg可以帮助确定插值点。(感觉好难啊(−_−;))
自己推了好久,发现根本就没办法算,之后只能找代码看(winograd.py),原来winograd是一定要加padding补全的,加多少padding视情况而定。所以其实这个算法就是针对卷积套公式,不过卷积计算选择不同算法,速度会不太一样。(现在有许多版本的winograd)
对于不同的输入用不同的padding补全,最后会选择性地舍弃部分数据。如的输入,在用计算时,会在左边补一个padding,在右边补两个padding,最后winograd卷积得到一个的输出,这时就要舍弃最右边的一列。
我尝试写了一下自己版本的winograd算法,以便后面学习优化,具体可以看下一篇。
参考文献